Spoiler: none of them are VCs.
Bpod is now in use by 30+ research labs, and spreading as fast as its users talk. It is rapidly becoming the preferred way to implement certain freely-moving rodent decision behaviors – but its current hardware is specialized for use with rodent behavior ports. To broaden its usefulness, we resolved specifications and development costs for an improved behavior system in collaboration with several key labs in our field. A crowd funding campaign organized by several forward-thinking group leaders (details below), has secured an initial round of funding for the project.
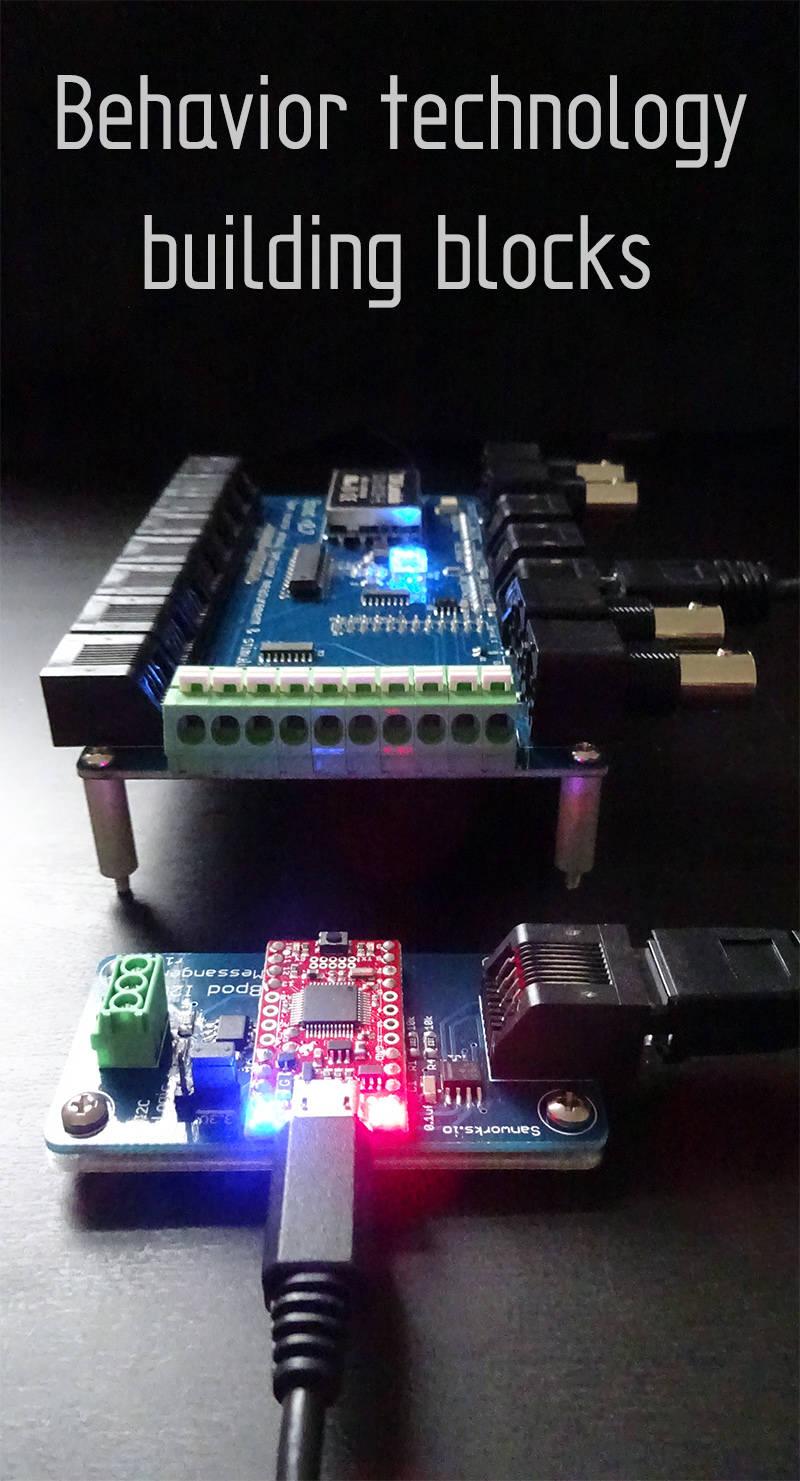
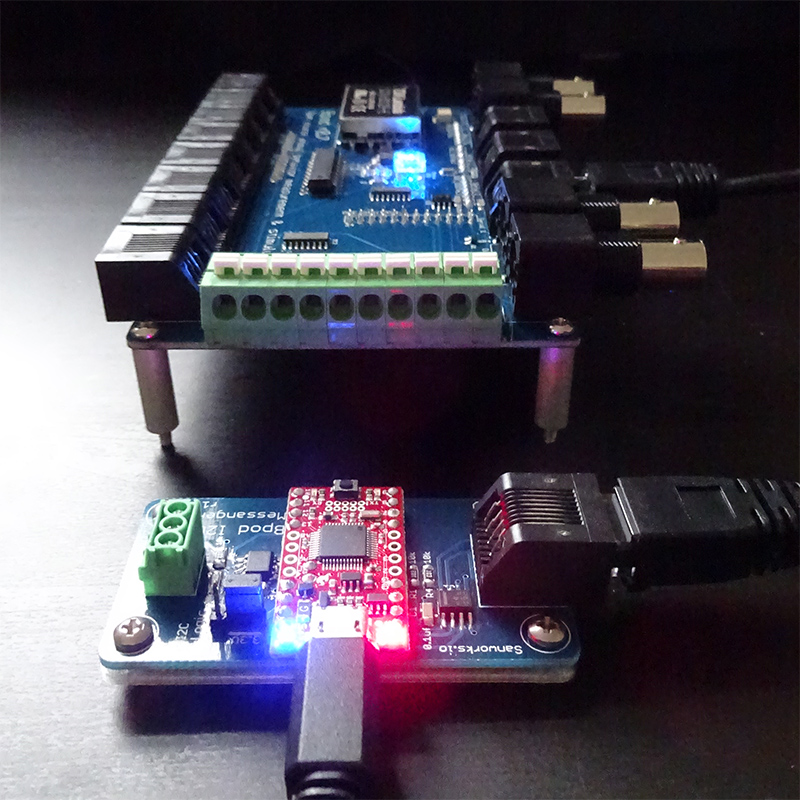
At the heart of the new design is a new system architecture, to simplify integration of custom behavior measurement tools with strict timing constraints. The central module will run finite state machine firmware similar to Bpod 0.5, and communicate with peripheral modules over buffered asynchronous serial channels. Peripheral modules are specialized 32-bit Arduino-programmable devices specialized for different measurement and actuation functions. The next-generation Bpod can be used with MATLAB or Python, and will provide a new platform to develop and customize behavioral hardware ensembles. Our ultimate goal is to make Bpod a broadly useful system for rigorous behavior measurement in rodent, human and primate.
Initial progress on the system has yielded several useful designs. In the beta branch of the Bpod repository, CAD and code files for Bpod 0.7 now provide an upgraded state machine, compatible with next-generation modules. Like its predecessor, Bpod 0.7 is powered by Arduino Due. The new hardware features an fRAM IC to store timing information acquired during experimental trials, permitting larger state machine descriptions and more complex processing with Arduino Due’s reclaimed internal memory. The hardware also has improved circuit board layout and power supply filtering, and improved i/o isolation on input channels. The software has been reorganized to keep data, settings, protocols and calibration files separate from the system code, simplifying synchronization with Github as updates become available.
Bpod 0.7 is a preliminary prototype of the new system's state machine module, and it is currently under beta evaluation in 5 labs. Its software is backwards compatible with Bpod 0.5 – so with a firmware update, current Bpod users can try the updated software on the beta branch of the Bpod repository (albeit with hardware limitations). A Python port of Bpod with command line functions is also available in the beta repository branch, as an alpha release.
We are very thankful to the group leaders who organized this crowd funding campaign:
Karel Svoboda (HHMI Janelia Farm, VA, USA)
Carlos Brody (Princeton University, NJ, USA)
Zach Mainen (Champalimaud Foundation, Portugal)
We also greatly appreciate the group leaders who have already helped to sponsor our next generation of open source behavior technology:
Anthony Zador (Cold Spring Harbor Laboratory, NY, USA)
Tobias Bonhoeffer (Max Planck Institute, Germany)
Jeff Magee (HHMI Janelia Farm, VA, USA)
Gidon Felsen (Colorado State University, CO, USA)
Mike Deweese (UC Berkeley, CA, USA)
Tim Hanks (UC Davis, CA, USA)
Finally, great thanks to two lab heads who invested heavily in earlier versions of the Bpod system:
Adam Kepecs (Cold Spring Harbor Laboratory, NY, USA)
Duda Kvistiani (Aarhus University, Denmark)
If you are interested in contributing, please contact admin@sanworks.io. Your contribution will help us provide you with a more powerful open source behavior measurement system, and support the next-generation of behavior hardware for the global Neuroscience community.